

ਆਟੋਮੈਟਿਕ ਪੈਨਲ ਬੈਂਡਰ HMBC2202-2203
ਉਤਪਾਦ ਨਿਰਧਾਰਨ
| ਨੰ. | ਨਾਮ | ਪੈਰਾਮੀਟਰ | ਯੂਨਿਟ |
| 1 | ਅਧਿਕਤਮ ਲੰਬਾਈ | 2200 ਹੈ | mm |
| 2 | ਅਧਿਕਤਮ ਚੌੜਾਈ | 1500 | mm |
| 3 | ਘੱਟੋ-ਘੱਟਝੁਕਣ ਦੀ ਲੰਬਾਈ | 130 | mm |
| 4 | ਘੱਟੋ-ਘੱਟ ਮੋੜਨ ਵਾਲੀ ਚੌੜਾਈ | 240 | mm |
| 5 | ਵੱਧ ਤੋਂ ਵੱਧ ਮੋੜਨ ਵਾਲੀ ਮੋਟਾਈ (MS, UTS410N/mm²) | 2 | mm |
| 6 | ਘੱਟੋ-ਘੱਟ ਮੋੜਨ ਵਾਲੀ ਮੋਟਾਈ (MS, UTS410N/mm²) | 0.35 | mm |
| 7 | ਅਧਿਕਤਮ ਝੁਕਣ ਦੀ ਉਚਾਈ | 200 | mm |
| 8 | ਉੱਪਰੀ ਪ੍ਰੈਸ ਦੀ ਲੰਬਾਈ ਸਮਾਯੋਜਨ ਮੋਡ | ਆਟੋਮੈਟਿਕ | |
| 9 | ਔਸਤ ਊਰਜਾ ਦੀ ਖਪਤ | 4 | KW |
| 1 0 | ਆਉਟਲੁੱਕ ਆਕਾਰ: L*W*h | 6100*2700*2920 | mm |
ਉਤਪਾਦ ਨਿਰਧਾਰਨ
| ਨੰ. | ਨਾਮ | ਪੈਰਾਮੀਟਰ | ਯੂਨਿਟ |
| 1 | ਅਧਿਕਤਮ ਲੰਬਾਈ | 2200 ਹੈ | mm |
| 2 | ਅਧਿਕਤਮ ਚੌੜਾਈ | 1500 | mm |
| 3 | ਘੱਟੋ-ਘੱਟਝੁਕਣ ਦੀ ਲੰਬਾਈ | 430 | mm |
| 4 | ਘੱਟੋ-ਘੱਟ ਮੋੜਨ ਵਾਲੀ ਚੌੜਾਈ | 350 | mm |
| 5 | ਵੱਧ ਤੋਂ ਵੱਧ ਮੋੜਨ ਵਾਲੀ ਮੋਟਾਈ (ਸਟੇਨਲੈੱਸ ਸਟੀਲ, UTS660N/mm) | 1.8 (+-90 °) | mm |
| 6 | ਵੱਧ ਤੋਂ ਵੱਧ ਮੋੜਨ ਵਾਲੀ ਮੋਟਾਈ (ਸਟੀਲ, UTS410N/mm) | 3 (+-90 °) | mm |
| 8 | ਘੱਟੋ-ਘੱਟ ਮੋੜਨ ਵਾਲੀ ਮੋਟਾਈ (ਅਲਮੀਨੀਅਮ, UTS120N/mm) | 0.35 | mm |
| 9 | ਅਧਿਕਤਮ ਝੁਕਣ ਦੀ ਉਚਾਈ | 300 | mm |
| 10 | ਉੱਪਰੀ ਪ੍ਰੈਸ ਦੀ ਲੰਬਾਈ ਸਮਾਯੋਜਨ ਮੋਡ | ਆਟੋਮੈਟਿਕ | |
| 11 | ਔਸਤ ਊਰਜਾ ਦੀ ਖਪਤ | 12 | KW |
| 12 | ਭਾਰ | 32 | T |
| 13 | ਆਉਟਲੁੱਕ ਆਕਾਰ: L*W*h | 6300*5500*3300 | mm |
ਗੁਣ ਅਤੇ ਮੁੱਖ ਬਣਤਰ
ਮਸ਼ੀਨ ਡਿਜ਼ਾਇਨ ਅਤੇ ਨਿਰਮਾਣ ਦੇ ਮਾਮਲੇ ਵਿੱਚ, He Bei Han Zhin CNC Machinery Co., Ltd.ਮੁੱਖ ਤੌਰ 'ਤੇ ਹੇਠਾਂ ਦਿੱਤੇ ਨੁਕਤਿਆਂ 'ਤੇ ਧਿਆਨ ਕੇਂਦ੍ਰਤ ਕਰਦਾ ਹੈ:
1. ਵਿਹਾਰਕਤਾ ਦਾ ਪਿੱਛਾ ਕਰਨ ਅਤੇ ਉਪਭੋਗਤਾਵਾਂ ਲਈ ਹਰ ਪੈਸਾ ਬਚਾਉਣ ਦੀ ਮਾਰਕੀਟ ਧਾਰਨਾ;
2. ਬਹੁਤ ਭਰੋਸੇਯੋਗ ਅਤੇ ਸਟੀਕ ਡਿਜ਼ਾਈਨ ਵਿਚਾਰ;
3. ਉੱਚ ਗੁਣਵੱਤਾ ਵਾਲਾ ਕੱਚਾ ਮਾਲ, ਆਊਟਸੋਰਸ ਕੀਤੇ ਹਿੱਸੇ ਅਤੇ ਸ਼ਾਨਦਾਰ ਪ੍ਰੋਸੈਸਿੰਗ ਤਕਨਾਲੋਜੀ;
4. ਵਰਤੋਂ ਅਤੇ ਰੱਖ-ਰਖਾਅ ਦੀ ਸਹੂਲਤ ਅਤੇ ਸੁਰੱਖਿਆ 'ਤੇ ਵਧੇਰੇ ਜ਼ੋਰ;
5. ਉਸੇ ਉਦਯੋਗ ਵਿੱਚ ਘੱਟ ਰੱਖ-ਰਖਾਅ ਦੀ ਦਰ ਅਤੇ ਰੱਖ-ਰਖਾਅ ਦੀ ਲਾਗਤ।
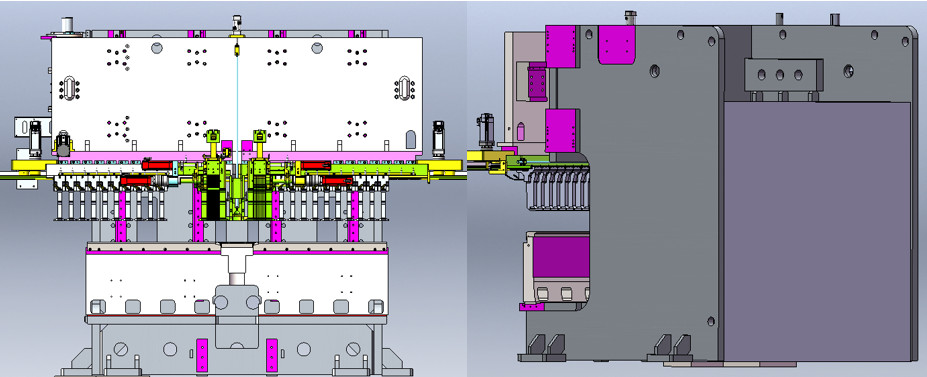
ਫਰੇਮ
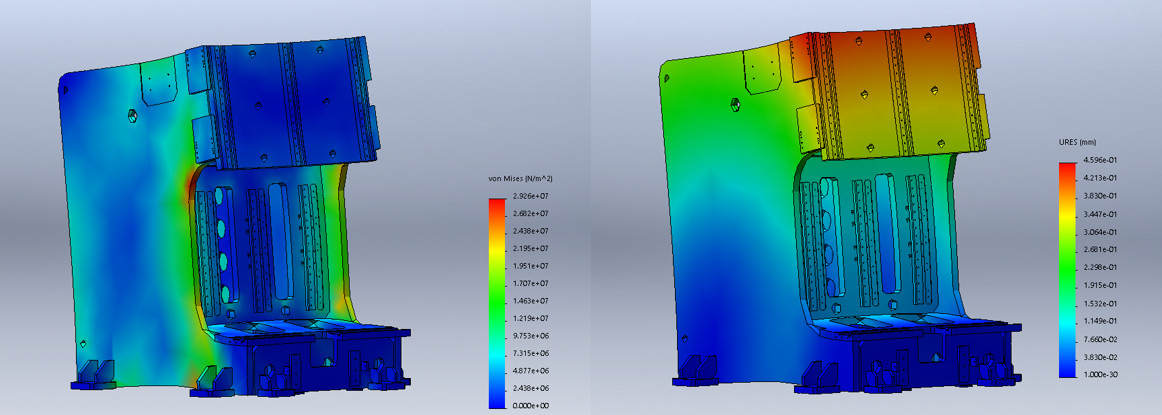
A. ਤਿੰਨ-ਅਯਾਮੀ ਸੀਮਿਤ ਤੱਤ ਮਾਡਲ ਸਥਾਪਤ ਕਰੋ: ਵਿਕਸਿਤ ਅਤੇ ਡਿਜ਼ਾਈਨ ਕੀਤੇ ਗਏ ਤਿੰਨ-ਅਯਾਮੀ ਠੋਸ ਮਾਡਲ ਦੇ ਅਨੁਸਾਰ, ਗਣਨਾ ਲਈ ਸੀਮਿਤ ਤੱਤ ਗਤੀਸ਼ੀਲ ਮਾਡਲ ਸਥਾਪਤ ਕਰੋ।ਮਾਡਲ ਫੋਰਸ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਕੁਨੈਕਸ਼ਨ ਦੇ ਮੁੱਖ ਭਾਗਾਂ ਨੂੰ ਸਮਝਦਾ ਹੈ.ਬਲ ਨੂੰ ਜੋੜਨ ਵਾਲੇ ਹਿੱਸਿਆਂ ਦੁਆਰਾ ਸਮਰਥਨ ਵਿੱਚ ਸੰਚਾਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਫਿਰ ਸਮਰਥਨ ਦੀ ਤਾਕਤ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
B. ਸਥਿਰ ਵਿਸ਼ਲੇਸ਼ਣ ਦੇ ਨਤੀਜਿਆਂ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ: ਹੌਲੀ ਪ੍ਰਕਿਰਿਆ ਦੀ ਗਤੀ ਦੇ ਕਾਰਨ, ਤਾਕਤ ਦੇ ਵਿਸ਼ਲੇਸ਼ਣ ਨੂੰ ਸਥਿਰ ਸਮੱਸਿਆਵਾਂ ਦਾ ਕਾਰਨ ਮੰਨਿਆ ਜਾ ਸਕਦਾ ਹੈ।ਕਟਰ ਦੇ ਸਿਰ ਦੀ ਲੰਬਕਾਰੀ ਦਿਸ਼ਾ ਵਿੱਚ ਪਲੇਟ ਦਬਾਉਣ ਵਾਲੇ ਲੋਡ ਅਤੇ ਝੁਕਣ ਵਾਲੇ ਲੋਡ ਦੇ ਅਨੁਸਾਰ, ਤਣਾਅ ਅਤੇ ਵਿਗਾੜ ਦੇ ਨਤੀਜੇ ਹੇਠਾਂ ਦਿੱਤੇ ਚਿੱਤਰ ਵਿੱਚ ਦਿਖਾਏ ਗਏ ਹਨ।ਫਿਊਜ਼ਲੇਜ ਦੇ ਗਲੇ 'ਤੇ ਵੱਧ ਤੋਂ ਵੱਧ ਤਣਾਅ ਦਿਖਾਈ ਦਿੰਦਾ ਹੈ, ਵੱਧ ਤੋਂ ਵੱਧ ਤਣਾਅ 21.2mpa ਹੈ, ਵੱਧ ਤੋਂ ਵੱਧ ਵਿਗਾੜ ਫਿਊਜ਼ਲੇਜ ਦੇ ਉੱਪਰਲੇ ਸਿਰੇ 'ਤੇ ਦਿਖਾਈ ਦਿੰਦਾ ਹੈ, ਅਤੇ ਵੱਧ ਤੋਂ ਵੱਧ ਵਿਗਾੜ 0.30mm ਹੈ।
ਫਰੇਮ ਦੇ ਸੀਮਿਤ ਤੱਤ ਵਿਸ਼ਲੇਸ਼ਣ ਦੇ ਨਤੀਜਿਆਂ ਦੇ ਅਨੁਸਾਰ, Q345 ਸਟੀਲ ਨੂੰ ਸਮੱਗਰੀ ਵਜੋਂ ਚੁਣਿਆ ਗਿਆ ਹੈ;ਕਾਰਬਨ ਡਾਈਆਕਸਾਈਡ ਸ਼ੀਲਡ ਵੈਲਡਿੰਗ;ਵੈਲਡਿੰਗ ਦੁਆਰਾ ਪੈਦਾ ਹੋਏ ਤਣਾਅ ਨੂੰ ਖਤਮ ਕਰਨ ਲਈ ਟੈਂਪਰਿੰਗ ਟ੍ਰੀਟਮੈਂਟ ਕਰੋ;ਤਾਂ ਜੋ ਲੰਬੇ ਸਮੇਂ ਦੀ ਕਾਰਵਾਈ ਲਈ ਉਪਕਰਣ ਦੀ ਸ਼ੁੱਧਤਾ, ਸਥਿਰਤਾ ਅਤੇ ਉੱਚ ਕਠੋਰਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ।
ਉਪਰਲਾ ਰਾਮ
ਇਹ ਹਿੱਸਾ ਮੁੱਖ ਤੌਰ 'ਤੇ ਰੈਮ, ਉੱਚ ਟਾਰਕ ਲੀਡ ਪੇਚ, ਰੀਡਿਊਸਰ, ਗਾਈਡ ਰੇਲ, ਸਰਵੋ ਮੋਟਰ, ਆਦਿ ਦਾ ਬਣਿਆ ਹੁੰਦਾ ਹੈ। ਮੁੱਖ ਡਰਾਈਵ ਨੂੰ ਸਰਵੋ ਮੋਟਰ ਦੁਆਰਾ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਕੰਟਰੋਲ ਮੋਡ ਸਰਵੋ ਸਮਕਾਲੀ ਨਿਯੰਤਰਣ ਹੈ, ਜੋ ਪ੍ਰਭਾਵੀ ਢੰਗ ਨਾਲ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾ ਸਕਦਾ ਹੈ, ਤੇਜ਼ ਗਤੀ ਅਤੇ ਉੱਚ ਨਿਯੰਤਰਣਯੋਗਤਾ.ਲੀਡ ਪੇਚ ਅਤੇ ਗਾਈਡ ਰੇਲ ਦੀ ਲੁਬਰੀਕੇਸ਼ਨ ਆਟੋਮੈਟਿਕ ਲੁਬਰੀਕੇਸ਼ਨ ਨੂੰ ਅਪਣਾਉਂਦੀ ਹੈ, ਅਤੇ ਗਰੀਸ 00 # ਹੈ, ਤਾਂ ਜੋ ਲੰਬੇ ਸਮੇਂ ਦੇ ਸੰਚਾਲਨ ਲਈ ਲੀਡ ਪੇਚ ਅਤੇ ਗਾਈਡ ਰੇਲ ਦੀ ਸੇਵਾ ਜੀਵਨ ਅਤੇ ਸ਼ੁੱਧਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ।
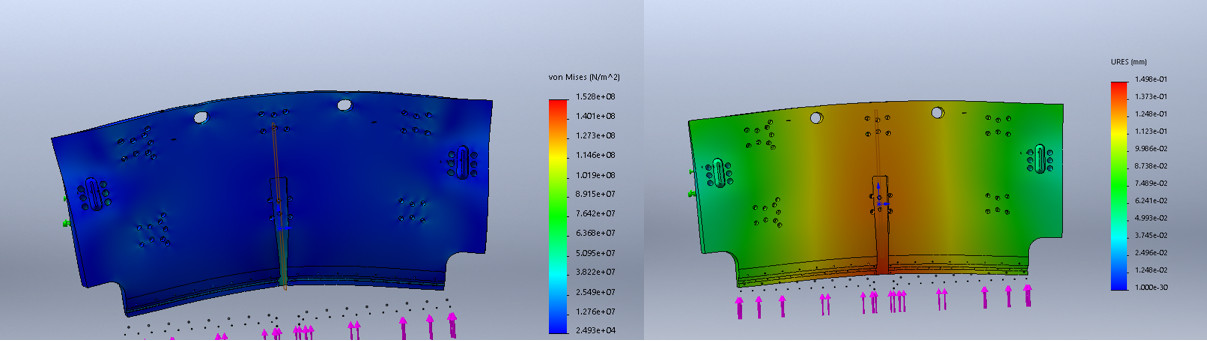
ਉਪਰਲੇ ਸਲਾਈਡਰ ਦੇ ਸਥਿਰ ਵਿਸ਼ਲੇਸ਼ਣ ਦੇ ਨਤੀਜਿਆਂ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ: ਉਪਰਲੇ ਵਰਕਟੇਬਲ ਦਾ ਤਣਾਅ ਵਿਸਥਾਪਨ ਨੈਫੋਗ੍ਰਾਮ ਦਰਸਾਉਂਦਾ ਹੈ ਕਿ ਵੱਧ ਤੋਂ ਵੱਧ ਤਣਾਅ ਉੱਪਰਲੇ ਹਿੱਸੇ ਦੇ ਸਿਖਰ 'ਤੇ ਦਿਖਾਈ ਦਿੰਦਾ ਹੈ, ਵੱਧ ਤੋਂ ਵੱਧ ਤਣਾਅ 152mpa ਹੈ, ਵੱਧ ਤੋਂ ਵੱਧ ਵਿਗਾੜ ਉਪਰਲੇ ਹਿੱਸੇ ਦੇ ਉੱਪਰਲੇ ਸਿਰੇ 'ਤੇ ਦਿਖਾਈ ਦਿੰਦਾ ਹੈ. ਵਰਕਟੇਬਲ, ਅਤੇ ਵੱਧ ਤੋਂ ਵੱਧ ਵਿਕਾਰ 0.15mm ਹੈ
ਰੈਮ ਦੇ ਸੀਮਿਤ ਤੱਤ ਵਿਸ਼ਲੇਸ਼ਣ ਦੇ ਨਤੀਜਿਆਂ ਦੇ ਅਨੁਸਾਰ, Q345 ਸਟੀਲ ਨੂੰ ਸਮੱਗਰੀ ਵਜੋਂ ਚੁਣਿਆ ਗਿਆ ਹੈ;ਕਾਰਬਨ ਡਾਈਆਕਸਾਈਡ ਸ਼ੀਲਡ ਵੈਲਡਿੰਗ;ਵੈਲਡਿੰਗ ਦੁਆਰਾ ਪੈਦਾ ਹੋਏ ਤਣਾਅ ਨੂੰ ਖਤਮ ਕਰਨ ਲਈ ਟੈਂਪਰਿੰਗ ਟ੍ਰੀਟਮੈਂਟ ਕਰੋ;ਤਾਂ ਜੋ ਲੰਬੇ ਸਮੇਂ ਦੀ ਕਾਰਵਾਈ ਲਈ ਉਪਕਰਣ ਦੀ ਸ਼ੁੱਧਤਾ, ਸਥਿਰਤਾ ਅਤੇ ਉੱਚ ਕਠੋਰਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ।
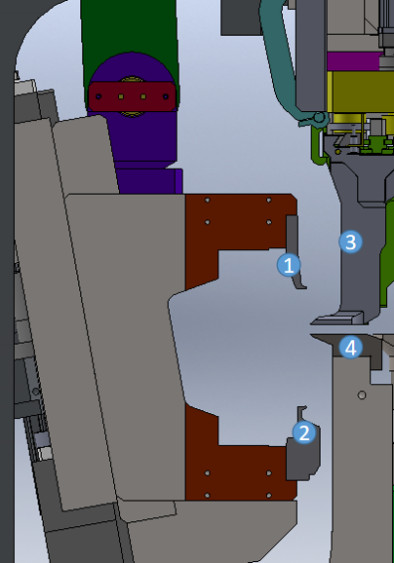
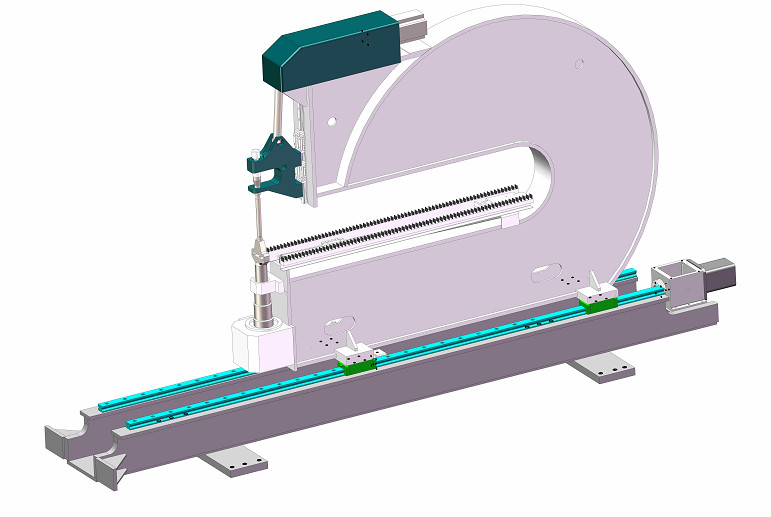
ਝੁਕਣ ਯੂਨਿਟ
ਮੋੜਨ ਵਾਲੀ ਯੂਨਿਟ ਦਾ ਪਾਵਰ ਡ੍ਰਾਈਵਿੰਗ ਹਿੱਸਾ ਹਾਈਡ੍ਰੌਲਿਕ ਪ੍ਰਣਾਲੀ ਦੀ ਭਾਗੀਦਾਰੀ ਤੋਂ ਬਿਨਾਂ ਸਰਵੋ ਮੋਟਰ ਦੁਆਰਾ ਚਲਾਇਆ ਜਾਂਦਾ ਹੈ, ਜਿਸ ਦੇ ਕੰਪੋਨੈਂਟ ਵੀਅਰ ਅਤੇ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਕੁਸ਼ਲਤਾ ਨੂੰ ਘਟਾਉਣ ਵਿੱਚ ਬਹੁਤ ਫਾਇਦੇ ਹਨ, ਅਤੇ ਇਹ ਰਾਜ ਦੁਆਰਾ ਵਕਾਲਤ ਕੀਤੀ ਊਰਜਾ-ਬਚਤ ਅਤੇ ਵਾਤਾਵਰਣ ਸੁਰੱਖਿਆ ਨੀਤੀ ਦੇ ਅਨੁਸਾਰ ਹੈ।
ਪਲੇਟ ਦੀ ਜਾਣਕਾਰੀ ਦੀ ਸੈਟਿੰਗ ਦੇ ਅਨੁਸਾਰ, ਸਿਸਟਮ ਆਪਣੇ ਆਪ ਹੀ ਉਪਰਲੇ ਦਬਾਉਣ ਵਾਲੇ ਚਾਕੂ 3 ਦੀ ਸਥਿਤੀ ਦੀ ਗਣਨਾ ਕਰਦਾ ਹੈ, ਉਪਰਲੇ ਦਬਾਉਣ ਵਾਲੇ ਚਾਕੂ 3 ਅਤੇ ਹੇਠਲੇ ਦਬਾਉਣ ਵਾਲੇ ਚਾਕੂ 4 ਵਿਚਕਾਰ ਦੂਰੀ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਦਾ ਹੈ, ਅਤੇ ਪਲੇਟ ਨੂੰ ਠੀਕ ਕਰਦਾ ਹੈ;ਸਿਸਟਮ ਸੈਟਿੰਗ ਦੇ ਅਨੁਸਾਰ, ਭਾਵੇਂ ਇਹ ਝੁਕਣਾ ਉੱਪਰ ਵੱਲ ਜਾਂ ਹੇਠਾਂ ਵੱਲ ਹੈ, ਝੁਕਣ ਵਾਲੀ ਸਥਿਤੀ ਵਿੱਚ ਤੇਜ਼ੀ ਨਾਲ ਜਾਣ ਲਈ ਹੇਠਲੇ ਝੁਕਣ ਵਾਲੇ ਚਾਕੂ 2 ਜਾਂ ਉੱਪਰਲੇ ਝੁਕਣ ਵਾਲੇ ਚਾਕੂ 1 ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰੋ;ਵੱਖ-ਵੱਖ ਸੈਟਿੰਗ ਕੋਣਾਂ ਦੇ ਅਨੁਸਾਰ, ਪੇਟੈਂਟਡ ਐਂਗਲ ਕੈਲਕੂਲੇਸ਼ਨ ਫਾਰਮੂਲਾ ਝੁਕਣ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਗਣਨਾ ਸਥਿਤੀ 'ਤੇ ਜਾਣ ਲਈ ਝੁਕਣ ਵਾਲੇ ਪੰਚ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਦਾ ਹੈ।
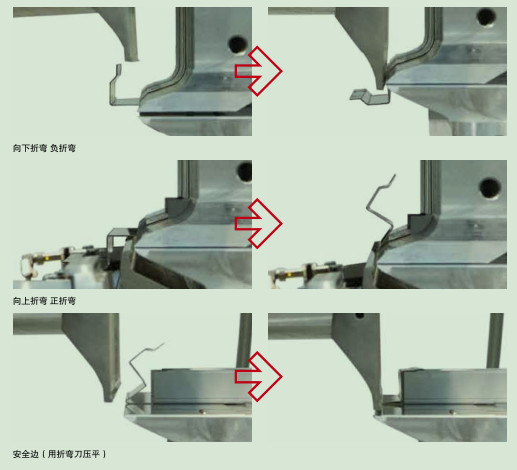
ਵੱਖ-ਵੱਖ ਝੁਕਣ ਦੇ ਤਰੀਕਿਆਂ ਦੇ ਅਨੁਸਾਰ, ਇਸ ਨੂੰ ਕੋਣ ਝੁਕਣ, ਵੱਡੇ ਚਾਪ ਝੁਕਣ, ਸਮਤਲ ਝੁਕਣ, ਆਦਿ ਵਿੱਚ ਵੰਡਿਆ ਜਾ ਸਕਦਾ ਹੈ, ਉਹਨਾਂ ਵਿੱਚੋਂ ਕੋਣ ਝੁਕਣ ਨੂੰ ਉੱਪਰ ਵੱਲ ਝੁਕਣ ਅਤੇ ਹੇਠਾਂ ਵੱਲ ਝੁਕਣ ਵਿੱਚ ਵੀ ਵੰਡਿਆ ਜਾਂਦਾ ਹੈ।
ਉੱਪਰੀ ਪ੍ਰੈਸ ਯੂਨਿਟ
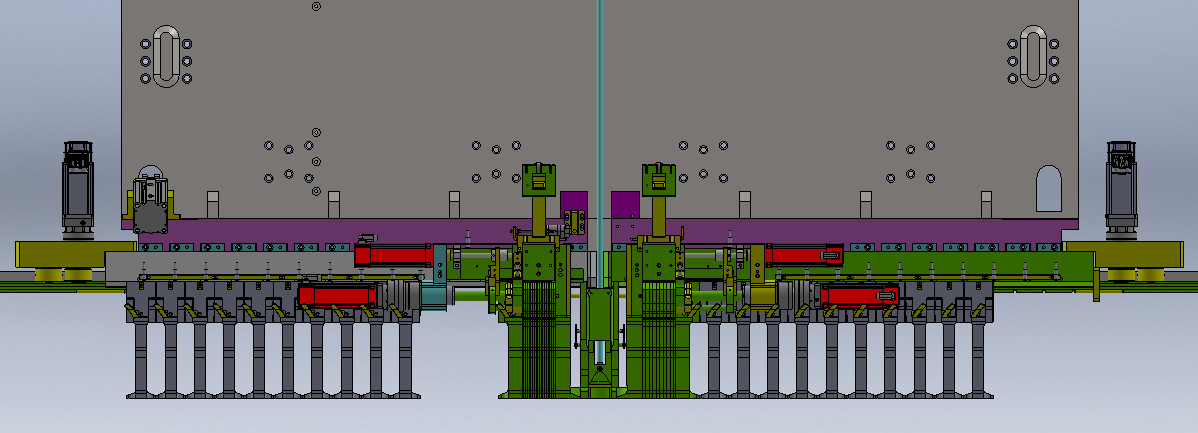
ਉੱਪਰੀ ਦਬਾਉਣ ਵਾਲੀ ਇਕਾਈ: ਸਾਰੇ ਝੁਕਣ ਦੀ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ ਵਰਤਿਆ ਜਾਣ ਵਾਲਾ ਇੱਕ ਹਿੱਸਾ।HMBC ਫੁੱਲ ਸਰਵੋ ਮਲਟੀਲੈਟਰਲ ਬੈਂਡਿੰਗ ਸੈਂਟਰ ਇੱਕ ਵਿਸ਼ੇਸ਼ ਅਪਰ ਪ੍ਰੈਸ ਯੂਨਿਟ ਨਾਲ ਲੈਸ ਹੈ, ਜਿਸ ਨੂੰ ਵੱਖ-ਵੱਖ ਪਲੇਟ ਲੰਬਾਈ ਦੇ ਅਨੁਸਾਰ ਆਪਣੇ ਆਪ ਸਥਾਪਿਤ ਅਤੇ ਐਡਜਸਟ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
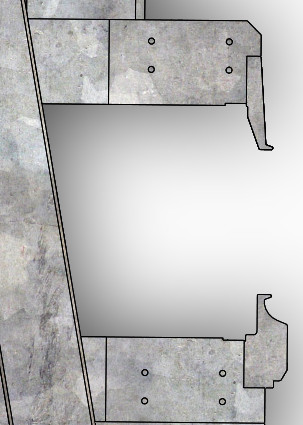
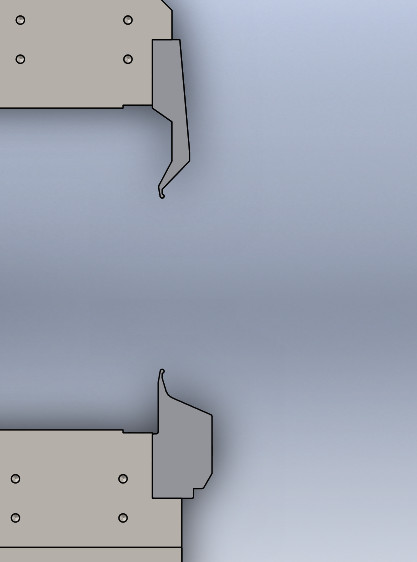
ਸੰਦ
ਝੁਕਣ ਵਾਲੇ ਸੰਦਾਂ ਨੂੰ ਉਪਰਲੇ ਝੁਕਣ ਵਾਲੇ ਸੰਦਾਂ ਅਤੇ ਹੇਠਲੇ ਝੁਕਣ ਵਾਲੇ ਸਾਧਨਾਂ ਵਿੱਚ ਵੰਡਿਆ ਜਾਂਦਾ ਹੈ।ਵਿਸ਼ੇਸ਼ ਝੁਕਣ ਵਾਲੇ ਸਾਧਨਾਂ ਨੂੰ ਗਾਹਕਾਂ ਦੀਆਂ ਵੱਖ-ਵੱਖ ਲੋੜਾਂ ਅਨੁਸਾਰ ਅਨੁਕੂਲਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ.
2. ਪਲੇਟ ਫੀਡਿੰਗ ਯੂਨਿਟ:
ਸ਼ੀਟ ਮੈਟਲ ਦੀ ਗਤੀ, ਕਲੈਂਪਿੰਗ ਅਤੇ ਰੋਟੇਸ਼ਨ ਨੂੰ ਕ੍ਰਮਵਾਰ ਮੈਨੀਪੁਲੇਟਰ 1, ਕਲੈਂਪ 2 ਅਤੇ ਰੋਟੇਟਿੰਗ ਡਿਸਕ 3 ਦੁਆਰਾ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।ਸ਼ੀਟ ਮੈਟਲ ਦੀ ਖੁਰਾਕ ਨੂੰ ਪੂਰੀ ਪ੍ਰੋਸੈਸਿੰਗ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ ਸਰਵੋ ਮੋਟਰ ਦੁਆਰਾ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਜੋ ਆਟੋਮੇਸ਼ਨ ਅਤੇ ਤੇਜ਼ ਸਥਿਤੀ ਨੂੰ ਮਹਿਸੂਸ ਕੀਤਾ ਜਾ ਸਕੇ, ਕਾਰਵਾਈ ਦਾ ਸਮਾਂ ਘਟਾਇਆ ਜਾ ਸਕੇ ਅਤੇ ਕੁਸ਼ਲਤਾ ਵਿੱਚ ਸੁਧਾਰ ਕੀਤਾ ਜਾ ਸਕੇ।ਢਾਂਚੇ ਦੀ ਨਵੀਨਤਾ ਅਤੇ ਪੂਰੇ ਸਰਵੋ ਨਿਯੰਤਰਣ ਦੀ ਵਰਤੋਂ ਦੇ ਕਾਰਨ, ਬਹੁਪੱਖੀ ਝੁਕਣ ਕੇਂਦਰ ਦੀ ਪੂਰੀ ਕਾਰਜ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ, ਸ਼ੀਟ ਮੈਟਲ ਦੀ ਕਲੈਂਪਿੰਗ ਅਤੇ ਰੋਟੇਸ਼ਨ ਸ਼ੁੱਧਤਾ ਨੂੰ ਬਰਕਰਾਰ ਰੱਖ ਸਕਦੀ ਹੈ.ਬਹੁਤ ਸਾਰੇ ਗੁੰਝਲਦਾਰ ਵਰਕਪੀਸ ਅਤੇ ਬਹੁਭੁਜ ਵਰਕਪੀਸ ਲਈ, ਨਿਰੰਤਰ ਰੋਟੇਸ਼ਨ ਸ਼ੁੱਧਤਾ 0.001 ਹੋਣ ਦੀ ਗਰੰਟੀ ਦਿੱਤੀ ਜਾ ਸਕਦੀ ਹੈ।
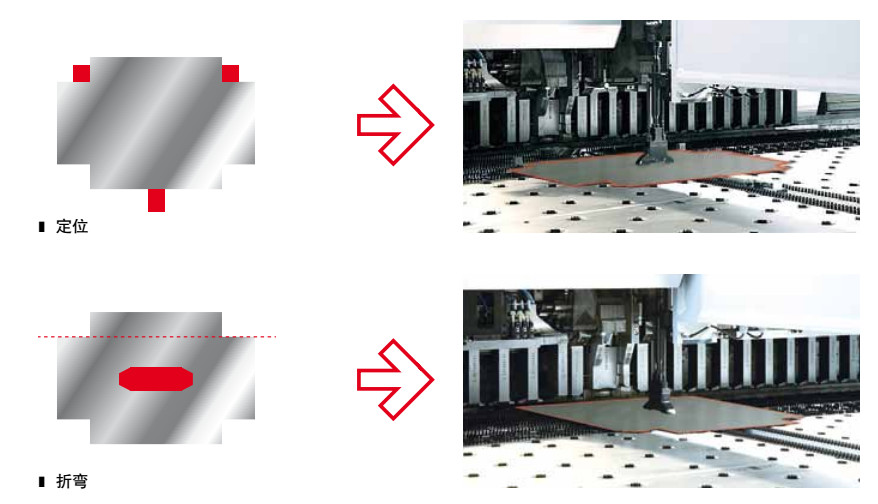
3. ਪਲੇਟ ਪੋਜੀਸ਼ਨਿੰਗ ਯੂਨਿਟ:
ਪਲੇਟ ਪੋਜੀਸ਼ਨਿੰਗ ਯੂਨਿਟ ਖੱਬੇ ਪੋਜੀਸ਼ਨਿੰਗ ਪਿੰਨ, ਸੱਜੇ ਪੋਜੀਸ਼ਨਿੰਗ ਪਿੰਨ, ਫਰੰਟ ਪੋਜੀਸ਼ਨਿੰਗ ਪਿੰਨ ਅਤੇ ਰੀਅਰ ਪੋਜੀਸ਼ਨਿੰਗ ਪਿੰਨ ਨਾਲ ਬਣੀ ਹੋਈ ਹੈ;ਖੱਬੇ ਅਤੇ ਸੱਜੇ ਪੋਜੀਸ਼ਨਿੰਗ ਪਿੰਨ ਪਲੇਟ ਦੇ ਖੱਬੇ ਅਤੇ ਸੱਜੇ ਪੋਜੀਸ਼ਨਾਂ ਦਾ ਪਤਾ ਲਗਾ ਸਕਦੇ ਹਨ।ਫਰੰਟ ਪੋਜੀਸ਼ਨਿੰਗ ਪਿੰਨ ਅਤੇ ਰੀਅਰ ਪੋਜੀਸ਼ਨਿੰਗ ਪਿੰਨ ਪਲੇਟ ਦੇ ਅਗਲੇ ਅਤੇ ਪਿਛਲੇ ਪੋਜ਼ੀਸ਼ਨਾਂ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਦੇ ਹਨ ਤਾਂ ਜੋ ਇਹ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ ਕਿ ਪਲੇਟ ਉਪਰਲੇ ਅਤੇ ਹੇਠਲੇ ਦਬਾਉਣ ਵਾਲੇ ਚਾਕੂਆਂ ਦੇ ਸਮਾਨਾਂਤਰ ਹੈ, ਜਿਸਦੀ ਵਰਤੋਂ ਪਲੇਟ ਦੀ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਪਲੇਟ ਪੋਜੀਸ਼ਨਿੰਗ ਯੂਨਿਟ ਪਲੇਟ ਦੀ ਆਟੋਮੈਟਿਕ ਪੋਜੀਸ਼ਨਿੰਗ ਨੂੰ ਪੂਰਾ ਕਰ ਸਕਦੀ ਹੈ ਅਤੇ ਇੱਕ ਸਮੇਂ 'ਤੇ ਬਹੁਪੱਖੀ ਝੁਕਣ ਨੂੰ ਆਪਣੇ ਆਪ ਪੂਰਾ ਕਰ ਸਕਦੀ ਹੈ, ਜੋ ਝੁਕਣ ਦੇ ਚੱਕਰ ਦੇ ਸਮੇਂ ਨੂੰ ਬਹੁਤ ਛੋਟਾ ਕਰਦਾ ਹੈ ਅਤੇ ਮੋੜ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਪਲੇਟ ਦੀ ਸ਼ੀਅਰਿੰਗ ਗਲਤੀ ਨੂੰ ਪਹਿਲੇ ਝੁਕਣ 'ਤੇ ਨਿਯੰਤਰਿਤ ਕਰਦਾ ਹੈ।
4.CNC ਸਿਸਟਮ
A: ਸਾਂਝੇ ਤੌਰ 'ਤੇ ਵਿਕਸਤ ਕੀਤੇ ਗਏ CNC ਸਿਸਟਮ ਅਤੇ ਸੌਫਟਵੇਅਰ ਨੂੰ ਤੇਜ਼ੀ ਅਤੇ ਸੁਵਿਧਾਜਨਕ ਢੰਗ ਨਾਲ ਲਾਗੂ ਅਤੇ ਪ੍ਰਬੰਧਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ
ਬੀ: ਮੁੱਖ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ:
a) .EtherCAT ਬੱਸ ਕੰਟਰੋਲ ਮੋਡ ਨੂੰ ਅਪਣਾਇਆ ਗਿਆ ਹੈ, ਮਜ਼ਬੂਤ ਦਖਲ-ਵਿਰੋਧੀ ਸਮਰੱਥਾ ਦੇ ਨਾਲ
b) ਫਾਰਮ ਵਿੱਚ ਹਰੇਕ ਪੜਾਅ ਦੇ ਸਿੱਧੇ ਪ੍ਰੋਗਰਾਮਿੰਗ ਅਤੇ ਇਨਪੁਟ ਮੋੜਨ ਵਾਲੇ ਡੇਟਾ ਦਾ ਸਮਰਥਨ ਕਰੋ
c) ਚਾਪ ਝੁਕਣ ਦਾ ਸਮਰਥਨ ਕਰੋ
d) ਪੂਰਾ ਇਲੈਕਟ੍ਰਿਕ ਸਰਵੋ ਕੰਟਰੋਲ
e) ਝੁਕਣ ਮੁਆਵਜ਼ਾ ਫੰਕਸ਼ਨ ਦਾ ਸਮਰਥਨ ਕਰੋ
f) ਦੋ-ਅਯਾਮੀ ਪ੍ਰੋਗਰਾਮਿੰਗ ਫੰਕਸ਼ਨ ਦਾ ਸਮਰਥਨ ਕਰੋ
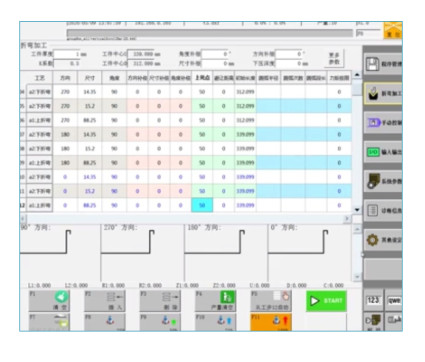
ਦੋ-ਅਯਾਮੀ ਪ੍ਰੋਗਰਾਮਿੰਗ ਫੰਕਸ਼ਨ, ਦੋ-ਅਯਾਮੀ DXF ਡਰਾਇੰਗ ਡੇਟਾ ਆਯਾਤ ਕਰੋ, ਅਤੇ ਆਪਣੇ ਆਪ ਮੋੜਨ ਦੀ ਪ੍ਰਕਿਰਿਆ, ਝੁਕਣ ਦਾ ਆਕਾਰ, ਝੁਕਣ ਵਾਲਾ ਕੋਣ, ਰੋਟੇਸ਼ਨ ਐਂਗਲ ਅਤੇ ਹੋਰ ਡੇਟਾ ਤਿਆਰ ਕਰੋ।ਪੁਸ਼ਟੀ ਹੋਣ ਤੋਂ ਬਾਅਦ, ਆਟੋਮੈਟਿਕ ਮੋੜਨ ਦੀ ਪ੍ਰਕਿਰਿਆ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ
ਮੁੱਖ ਭਾਗ ਦੀ ਸੂਚੀ
| ਨੰ. | ਨਾਮ | ਬ੍ਰਾਂਡ |
| 1 | ਫਰੇਮ | ਸਿਆਣਪ |
| 2 | ਸੰਦ | ਸਿਆਣਪ |
| 3 | ਝੁਕਣ ਯੂਨਿਟ | ਸਿਆਣਪ |
| 4 | CNC ਸਿਸਟਮ | ਸਿਆਣਪ |
| 5 | ਸਰਵੋ ਮੋਟਰ | ਸਿਆਣਪ |
| 6 | ਸਰਵੋ ਡਰਾਈਵਰ | ਸਿਆਣਪ |
| 7 | ਰੇਲ | ਸਿਆਣਪ |
| 8 | ਬਾਲਸਕ੍ਰੂ | ਸਿਆਣਪ |
| 9 | ਘਟਾਉਣ ਵਾਲਾ | ਤਾਈਵਾਨ |
| 10 | ਤੋੜਨ ਵਾਲਾ | ਸਨਾਈਡਰ |
| 11 | ਬਟਨ | ਸਨਾਈਡਰ |
| 12 | ਇਲੈਕਟ੍ਰੀਕਲ ਹਿੱਸਾ | ਸਨਾਈਡਰ |
| 13 | ਕੇਬਲ | ਯੀਕੂ |
| 14 | ਨੇੜਤਾ ਸਵਿੱਚ | ਓਮਰੋਨ |
| 15 | ਬੇਅਰਿੰਗ | SKF/NSK/NAICH |
4) ਮਸ਼ੀਨ ਟੂਲ ਦਾ ਡਿਜ਼ਾਈਨ, ਨਿਰਮਾਣ, ਨਿਰੀਖਣ ਅਤੇ ਸਥਾਪਨਾ ਹੇਠਾਂ ਦਿੱਤੇ ਮਾਪਦੰਡਾਂ ਨੂੰ ਪੂਰਾ ਕਰਦੀ ਹੈ।
1, GB17120-1997
2, Q/321088JWB19-2012
3, GB14349-2011
ਵਾਧੂ ਹਿੱਸੇ ਅਤੇ ਸੰਦ ਸੂਚੀ
| ਨੰ. | ਨਾਮ | Qt. | ਟਿੱਪਣੀ |
| 1 | ਟੂਲ ਬਾਕਸ | 1 | |
| 2 | ਪੈਡ ਇੰਸਟਾਲ ਕਰੋ | 8 | |
| 3 | ਅੰਦਰੂਨੀ ਹੈਕਸਾਗਨ ਸਪੈਨਰ | 1 ਸੈੱਟ | |
| 4 | ਮੈਨੁਅਲ ਰਿਫਿਊਲਿੰਗ ਬੰਦੂਕ | 1 | |
| 5 | CNC ਸਿਸਟਮ ਮੈਨੂਅਲ | 1 | |
| 6 | ਖੁੱਲ੍ਹਾ ਸਪੈਨਰ | 1 |





